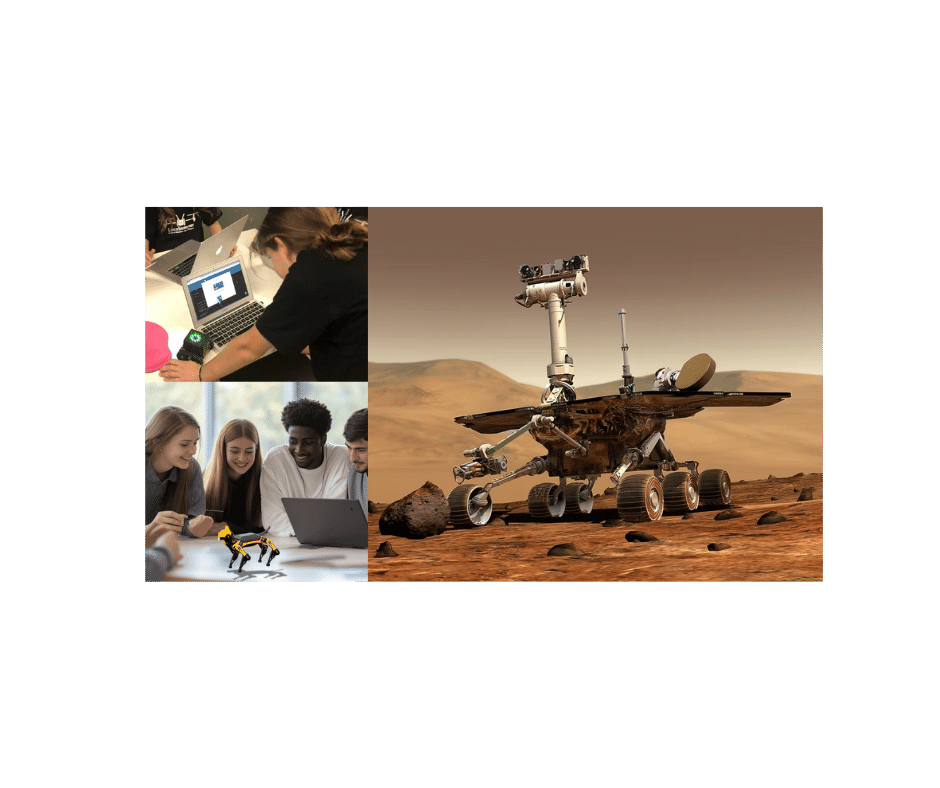
In the next few decades, NASA plans to send human crews back to the Moon, build a space station in lunar orbit, establish a permanent base on the lunar surface, and ultimately send astronauts to Mars. But with distance and time come challenges: what happens when something goes wrong millions of miles away from Earth?
That question lies at the heart of research at the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), where roboticists are helping design autonomous systems capable of maintaining and repairing habitats in deep space. Their work is part of the Resilient ExtraTerrestrial Habitats Institute (RETHi)—a NASA-funded collaboration led by Purdue University with partners at SEAS, the University of Connecticut, and the University of Texas at San Antonio.
RETHi’s goal is clear: to develop space habitats that can adapt, absorb, and recover from disruptions, whether caused by radiation, micrometeoroids, or simple wear and tear over time.
Robotic Repair Crews for Space Habitats
At the SEAS lab, Senior Research Fellow Justin Werfel leads a team developing autonomous robots that can repair or replace damaged components in a habitat.
“What happens if a meteorite breaches the habitat between missions, and the crew isn’t there to fix it?” Werfel asked. “Even when astronauts are present, emergencies and regular maintenance can easily overload them. You’d really like the habitat to handle as much as possible on its own, which means robots doing that work.”
To meet that challenge, the team has created new robotic arms, adaptive grippers, and collaborative control systems that enable robots to act safely and intelligently alongside humans.
Smarter, More Versatile Robots
Deep-space habitats won’t have room for dozens of specialized machines. A small number of robots will need to handle a wide range of jobs, from structural repair to filter replacement. To do that, SEAS engineers designed multi-mode robotic grippers that can change shape for different tasks.
The gripper can operate in three modes:
- A firm, rigid grasp for strength and precision
- A compliant mode for handling delicate or irregular objects
- A jointed configuration for manipulating objects without releasing them
This flexibility allows a single robot to take on multiple roles, an essential feature for long-duration missions with limited resources.
Working in Tight Spaces
Inside a lunar or Martian habitat, every inch matters. The RETHi team developed soft robotic arms that can bend, flex, and even stiffen when needed to lift heavier loads. These arms can navigate the cramped interiors of habitats, reach into narrow spaces, and work safely alongside human astronauts.
By embedding actuators that locally increase stiffness, these arms strike a balance between adaptability and strength, two qualities that are difficult to achieve simultaneously in robotic design.
Human-Robot Collaboration
Some jobs will require teamwork. For example, moving a solar panel or setting up large communication equipment may need both astronaut and robotic assistance. Researchers at SEAS developed a system allowing robots to follow an astronaut’s physical guidance without explicit programming. By sensing the forces applied to shared objects, the robots can intuitively move in sync with human partners.
This kind of natural coordination makes complex tasks safer, faster, and more efficient, an essential trait for future missions where time and communication with Earth are limited.
Designing Robot-Friendly Habitats
While engineers are teaching robots to adapt to human environments, they’re also asking: what if we design habitats to work better with robots?
The SEAS team has proposed “robot factors” for space architecture, simplifying complex tasks so that robots can execute them with limited dexterity. For instance, redesigning a water filtration unit to operate with a single robotic arm instead of two human hands makes maintenance far more feasible in space.
This approach supports astronauts, creating a safer, more sustainable environment for exploration.
Bridging Classroom Learning with Real-World Robotics
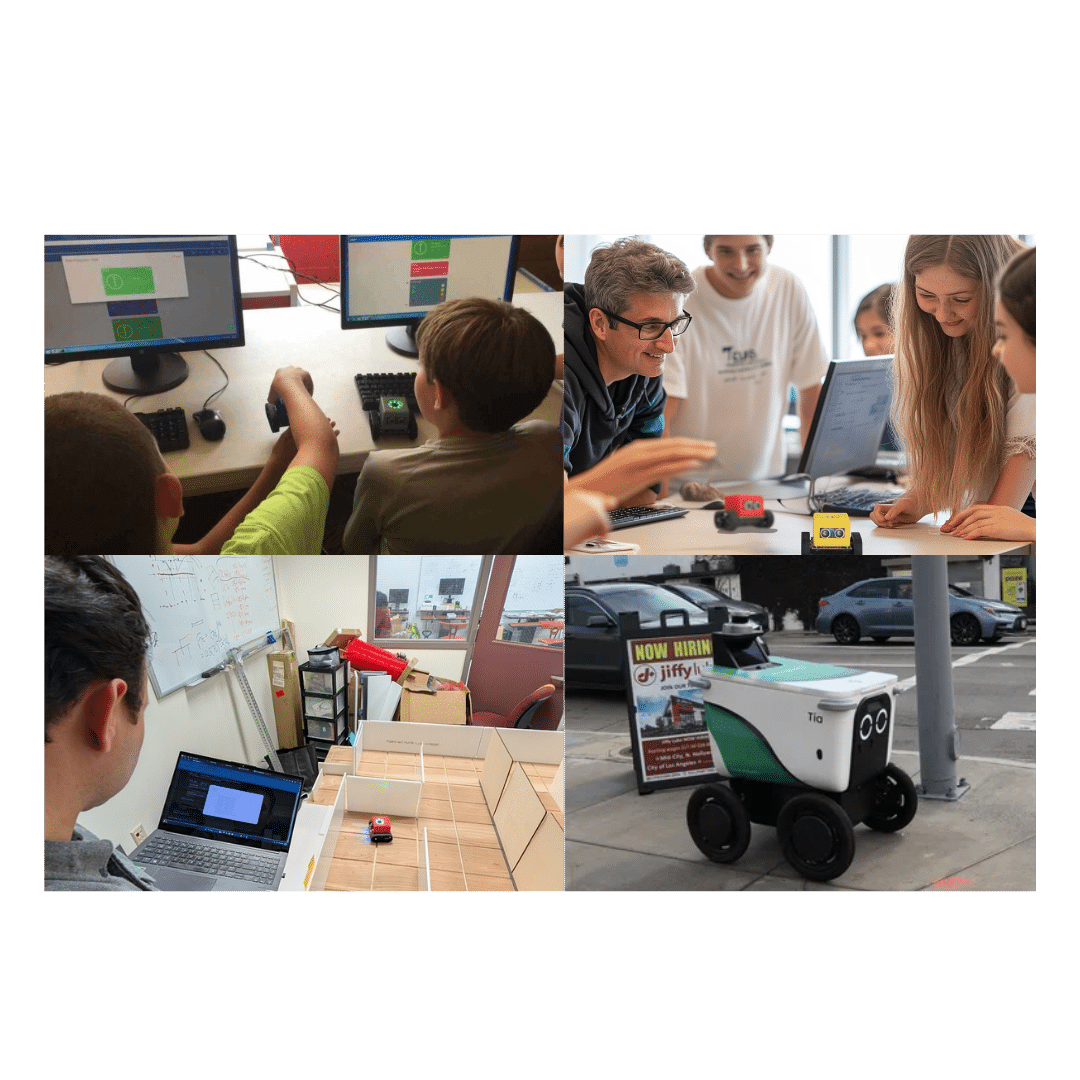
The work being done at SEAS and RETHi shows how robotics is about resilience, adaptation, and problem-solving under extreme conditions. These are the same principles LocoRobo brings to classrooms.
LocoRobo’s K12 robotics solutions empower students to program robots that tackle real-world challenges. With our STEM robotics kits, students learn how mechanical design, coding, and sensors come together to create intelligent systems, just like the robots that may one day maintain habitats on the Moon or Mars.
Through hands-on learning, students gain the technical and critical thinking skills that prepare them for careers in robotics, AI, aerospace, and engineering, fields shaping the next era of exploration.
Explore STEM robotics solutions built for real-world learning.